



协调控制技术:控制多机器人及变位机协调运动,既能保持焊枪和工件的相对姿态以满足焊接工艺的要求,又能避免焊枪和工件的碰撞。
还可以利用直线插补和圆弧插补功能焊接由直线及圆弧所组成的空间焊缝。弧焊机器人主要有熔化极焊接作业和非熔化极焊接作业两种类型。
具有可长期进行焊接作业、焊接作业的高生产率、和高稳定性等特点。随着技术的发展,弧焊机器人人正向着智能化的方向发展。
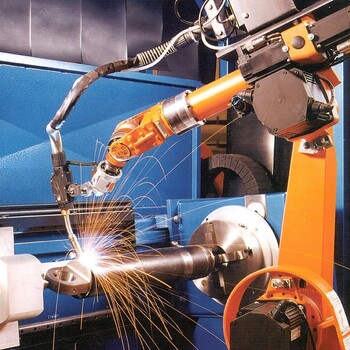
弧焊机器人是指用于进行自动弧焊的工业机器人。弧焊机器人的组成和原理与点焊机器人基本相同,在20世纪80年代中期,哈尔滨工业大学的蔡鹤皋、吴林等教授研制出了中国台弧焊机器人——华宇-Ⅰ型弧焊机器人。弧焊机器人主要应用于各类汽车零部件的焊接生产。在该领域,国际大弧焊机器人型工业机器人生产企业主要以向成套装备供应商提供单元产品为主。
弧焊机器人系统基本组成如下:机器人本体、控制系统、示教器、焊接电源、焊枪、焊接夹具、安全防护设施。系统组成还可根据焊接方法的不同以及具体待焊工件焊接工艺要求的不同等情况,选择性扩展以下装置:送丝机、清枪剪丝装置、冷却水箱、焊剂输送和回收装置(SAW时)、移动装置、焊接变位机、传感装置、除尘装置等。系统轴数(联动轴与非联动轴总和)
联系我时,请说是在黄页88网永新智能机器人栏目上看到的,谢谢!